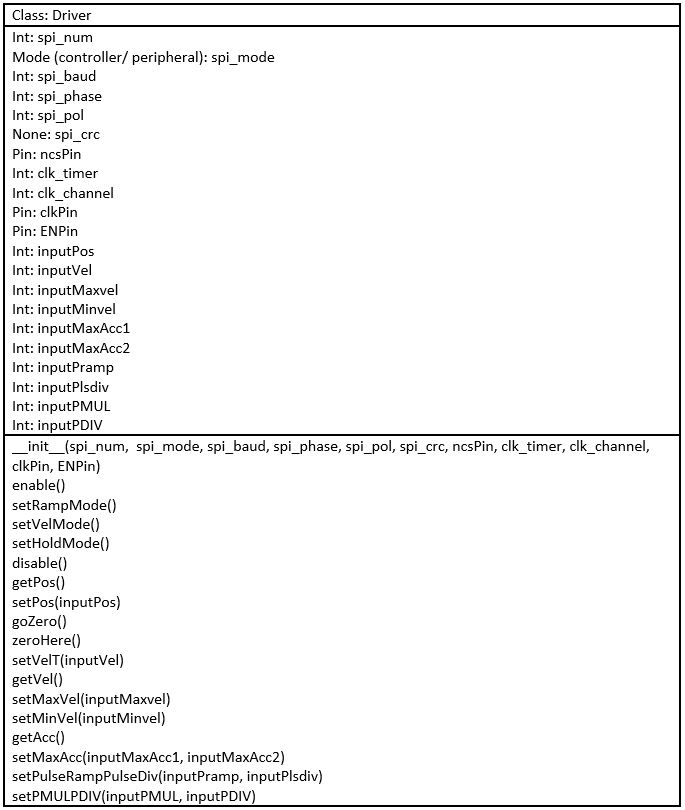
This class file contains the methods and attributes of the TMC4210 drivers.
The file includes methods for setting target position/velocity, reading position/velocity, writing to configuration adresses, and homing/ zeroing the stepper motors. These methods were developed by sending specific datagrams of lenth 32-bits to the stepper drivers. Each datagram includes a register byte (8 bits) and data bytes (can utilize up to 24 bits) sent through SPI protocol. Using the send_recv() function, we are able to recieve back a status datagram that signifies that each function works as intended.
Source Folder [https://github.com/Mecha12RumbaoaOsborne/ME405-TERM-PROJECT]
- Date
- 06/09/2022