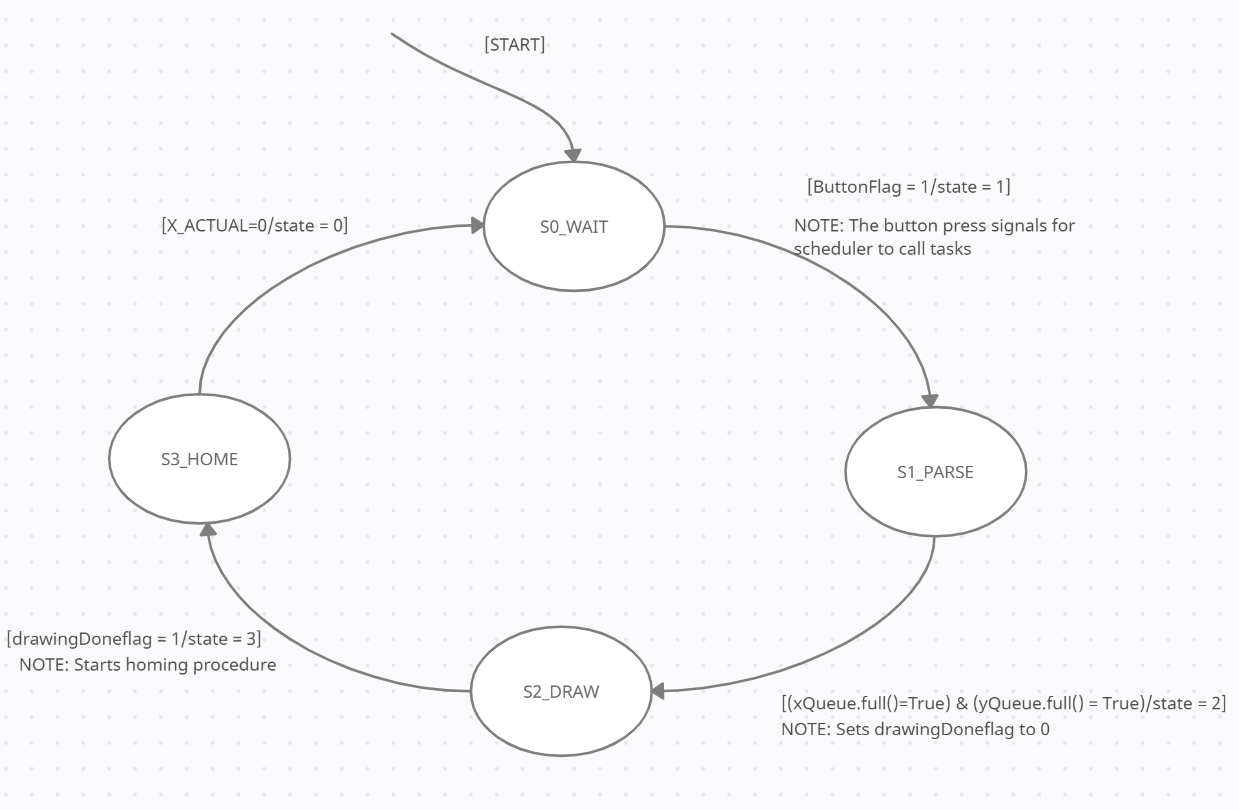
This main routine makes use of the provided scheduler to run the parsing of an hpgl file saved in baord memory, and sending insturctions (pen up/down) and coordinates to the plotter.
When ran, the main routine waits for the user to press the blue button on the NucleoL476RG board. Once this press is detected, a task share is set to 1 signaling the beginning of the program.The scheduler runs the parsing task to extract instructions and coordinates from the hpgl file. The instructions are interpreted as pen up/down and the DC motor actuates according to it. The xy coordinates are converted to theta 1 and theta 2 values approximated by NewtoRaphson and are sent to their repective stepper motor. Once the task finishes a flag is raised and the steppers go back to home position.
Source Folder [https://github.com/Mecha12RumbaoaOsborne/ME405-TERM-PROJECT]
- Date
- 06/09/2022